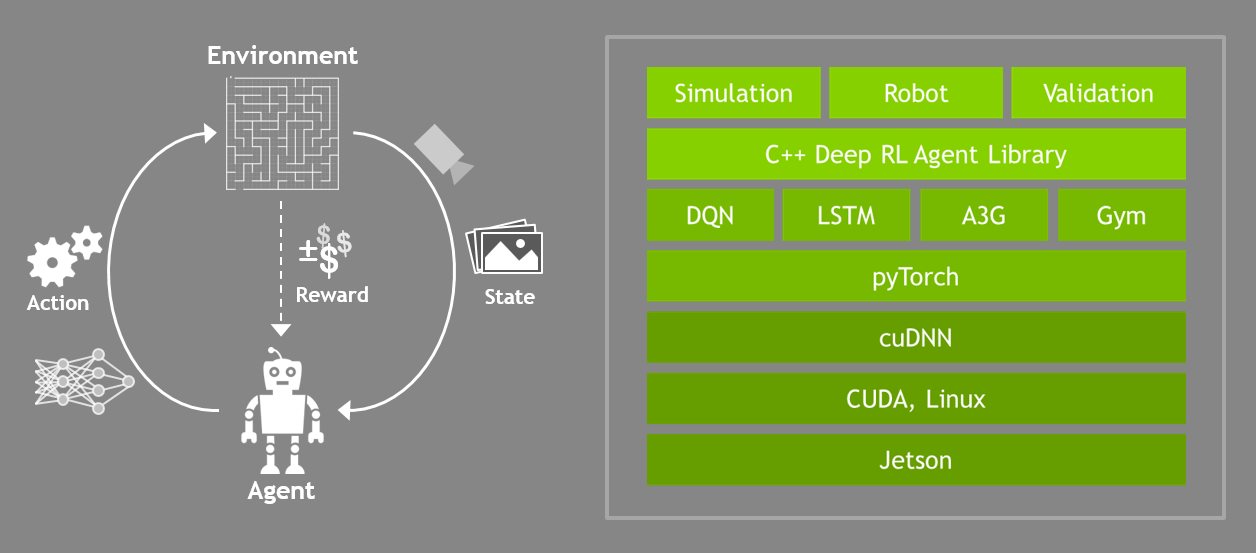
Jetson-reinforcement is a training guide, provided by NVIDIA, for deep reinforcement learning on the TX1 and TX2 using PyTorch. The tutorial is not currently officially supported on the Jetson Xavier. We provide instructions to get the Deep Q Learning 'cartpole' demo running on the Xavier.
The objective of this example is to balance a pole that is attached by an un-actuated joint to a cart, which moves along a friction-less track. Deep Q Learning solves the problem by generating actions based just on pictures of the environment and the received reward.
If you want to test this demo on your Xavier please visit our jetson-reinforcement wiki page.
If you are new to the Xavier or are planning on getting one please visit our Jetson Xavier wiki page.
No comments:
Post a Comment